Hinge Joint 2D
This joint allows a GameObject controlled by Rigidbody 2D physics to be attached to a point in space around which it can rotate. The rotation can be left to happen passively (for example, in response to a collision) or can be actively powered by a motor torque provided by the Joint 2D itself. You can set limits to prevent the hinge from making a full rotation, or make more than a single rotation.
属性
| 属性 | 功能 | |
|---|---|---|
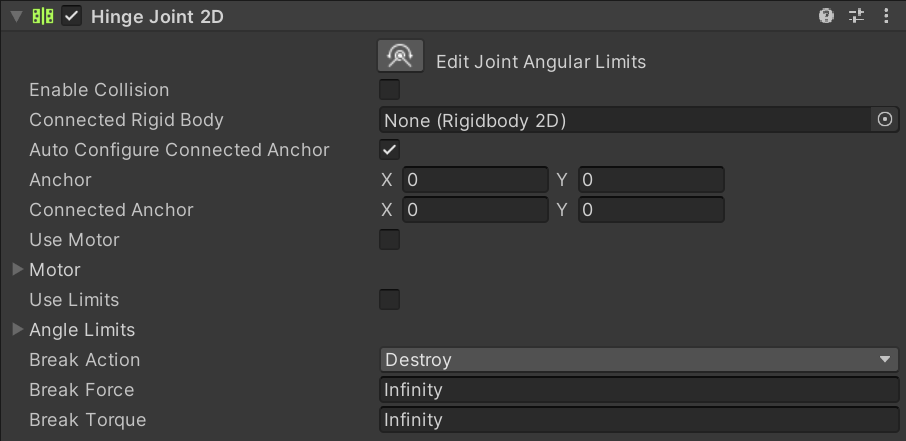
| Enable Collision | Enable this property to enable collisions between the two connected GameObjects. | |
| Connected Rigidbody | Specify the other GameObject this joint connects to. If you leave this as None, the other end of the joint is fixed to a point in space defined by the Connected Anchor setting. Select the circle icon to the right to view a list of GameObjects to connect to. | |
| Auto Configure Connected Anchor | Enable this property to automatically set the anchor location for the other GameObject this Hinge Joint 2D connects to. You do not need to enter coordinates for the Connected Anchor property if you enable this property. | |
| Anchor | Define where (in terms of x, y-coordinates on the Rigidbody 2D) the end point of the joint connects to this GameObject. | |
| Connected Anchor | Define where (in terms of x, y-coordinates on the Rigidbody 2D) the end point of the joint connects to the other GameObject. | |
| Use Motor | Enable this to apply motor force to the joint. | |
| Motor | Select this to expand this property’s settings. | |
| Motor Speed | Set the target motor speed (in degrees per second). | |
| Maximum Motor Force | Set the maximum torque (or rotation) the motor can apply when attempting to reach the target speed. | |
| Use Limits | Enable this to limit the rotation angle. | |
| Angle Limits | Select this to expand the Angle limits settings. Set the limits used when User Limits is enabled. | |
| Lower Angle | 设置此限制允许的旋转弧的下限。 | |
| Upper Angle | 设置此限制允许的旋转弧的上限。 | |
| Break Action | Set the action taken when either the force or torque threshold is exceeded. | |
| Break Force | Set the force threshold which if exceeded, will cause the joint to perform the selected Break Action. The default value is set to Infinity, which can never be exceeded and therefore the Break Action can never be taken while the threshold remains at this value. | |
| Break Torque | Set the torque threshold which if exceeded, will cause the joint to perform the selected Break Action. The default value is set to Infinity, which can never be exceeded and therefore the Break Action can never be taken while the threshold remains at this value. | |
Using this joint
The Hinge Joint 2D’s is used to have a joint that allows a GameObject to rotate around a particular point, for example a door hinge, wheels, or pendulums.
You can use this joint to make two points overlap. Those two points can be two Rigidbody 2D components, or a Rigidbody 2D component and a fixed position in the world space. Connect the Hinge Joint 2D to a fixed position in the world by setting Connected Rigidbody to None. The joint applies a linear force to both connected Rigidbody 2D GameObjects.
The Hinge Joint 2D has a simulated rotational motor which you can turn on or off. Set the Maximum Motor Speed and Maximum Motor Force to control the angular speed (Torque) and make the two Rigidbody 2D GameObjects rotate in an arc relative to each other. Set the limits of the arc using Lower Angle and Upper Angle.
约束
2D 铰链关节同时有三个约束。所有约束均为可选约束:
- 将两个 2D 刚体游戏对象上的两个锚点之间的相对线性距离保持为零。
- Maintain an angular speed between two anchor points on two Rigidbody 2D GameObjects (limited with a maximum torque in Maximum Motor Force).
- 将角度保持在指定弧度内。
使用此关节构建的物理游戏对象就好像是通过旋转枢轴相连一样。例如:
- A see-saw pivot where the horizontal section is connected to the base. Use the joint’s Angle Limits to simulate the highest and lowest point of the see-saw’s movement.
- A pair of scissors connected together with a hinge pivot. Use the joint’s Angle Limits to simulate the closing and maximum opening of the scissors.
- 一个连接到汽车车身的简单车轮(通过枢轴将车轮中心连接到汽车上)。在此示例中,可以使用 2D 铰链关节的电机来旋转车轮。
其他资源
- Refer to Joints 2D for more information about other 2D Joints.